1. Alat dan Bahan[Back]
- Jumper

- Arduino Uno

Microcontroller ATmega328P |
Operating Voltage 5 V |
Input Voltage (recommended) 7 – 12 V |
Input Voltage (limit) 6 – 20 V |
Digital I/O Pins 14 (of which 6 provide PWM output) |
PWM Digital I/O Pins 6 |
Analog Input Pins 6 |
DC Current per I/O Pin 20 mA |
DC Current for 3.3V Pin 50 mA |
Flash Memory 32 KB of which 0.5 KB used by bootloader |
SRAM 2 KB |
EEPROM 1 KB |
Clock Speed 16 MHz |
- Breadboard

breadboard adalah board yang digunakan untuk membuat rangkaian elektronik tanpa harus merepotkan pengguna untuk menyolder. Biasanya papan breadboard ini digunakan untuk membuat rangkaian elektronik sementara untuk tujuan uji coba atau prototype
- Mottor Servo

Motor servo adalah jenis motor yang dirancang untuk menghasilkan gerakan presisi dengan mengontrol posisi sudutnya. Motor servo memiliki mekanisme umpan balik (feedback) yang memungkinkan mereka untuk mencapai sudut yang tepat dan mempertahankan posisi tersebut. Mereka biasanya digunakan dalam aplikasi di mana kontrol presisi diperlukan, seperti dalam robotika, kendali penerbangan model, peralatan industri, dan banyak lagi. Motor servo umumnya terdiri dari motor DC, gearbox, potensiometer, dan sirkuit kendali yang kompleks. Mereka diatur menggunakan sinyal PWM (Pulse Width Modulation), di mana lebar pulsa PWM menentukan sudut posisi motor servo. Hal ini memungkinkan pengguna untuk mengatur posisi sudut dengan presisi tinggi.
- Push Button

Push button, atau tombol tekan, adalah jenis sakelar sederhana yang digunakan untuk memulai atau menghentikan suatu tindakan atau proses ketika ditekan. Mekanisme kerjanya sangat dasar: ketika tombol ditekan, sakelar di dalamnya tertutup, menghubungkan dua terminal sehingga mengalirkan arus listrik. Ketika tombol dilepaskan, sakelar terbuka dan arus tidak lagi mengalir. Push button umumnya digunakan dalam berbagai aplikasi elektronik dan sistem kontrol, termasuk dalam pengendalian perangkat, input pengguna pada perangkat elektronik, atau sebagai sakelar sederhana dalam rangkaian elektronik. Dalam mikrokontroler, push button sering digunakan sebagai input untuk memicu aksi atau respons tertentu dari program.
2. Rangkaian Simulasi[Back]
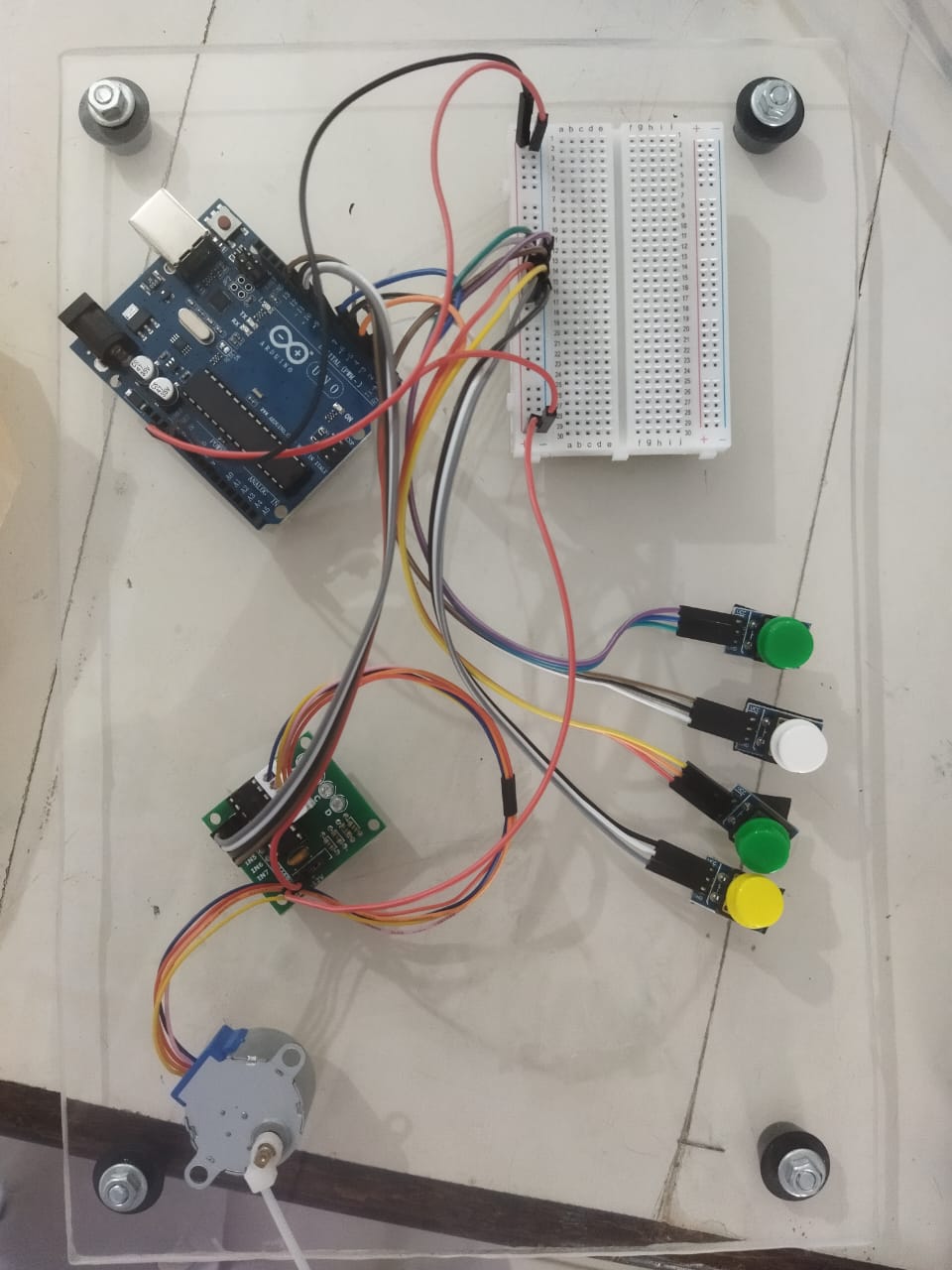
3. Prinsip Kerja Rangkaian[Back]
Pada Percobaan 6 menggunakan kenop untuk mengontrol putaran motor stepper dan mengontrol keluaran motor stepper sedangkan menggunakan pengontrol motor servo yang memiliki gigi lebih banyak pada rotornya dibandingkan motor DC dan motor servo lainnya. . Memiliki rotor dengan jumlah gigi yang lebih banyak memberikan keuntungan dalam keakuratan putaran motor stepper. Rangkaian ini dikendalikan oleh program Arduino yang kita pasang dan susun sesuai kebutuhan percobaan.
Dengan menggunakan tombol sebagai input, kita dapat mengontrol pergerakan motor stepper sesuai keinginan. Menggunakan motor servo yang memiliki gigi lebih banyak dibandingkan motor DC dan motor servo lainnya merupakan pilihan penting untuk mencapai tingkat presisi yang diinginkan. Perbedaan ini memungkinkan motor stepper dapat beroperasi dengan putaran yang lebih presisi.
4. Video Rangkaian[Back]
5. Analisa[Back]
- Percobaan 61. Bagaimana cara button dapat mengubah putaran motor stepper?2. Bandingkan rangkaian TP dengan rangkaian Percobaan


6. Link Download[Back]












{kind=link}